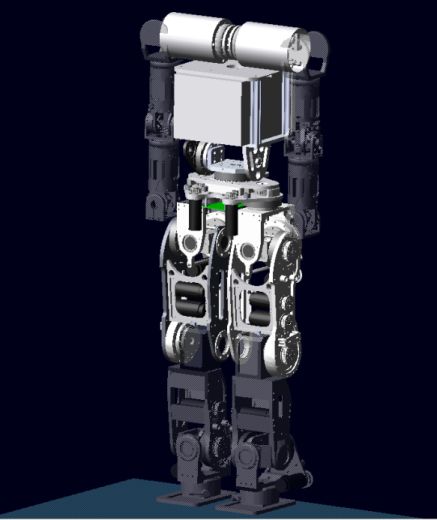
In my second year of MS study, my main research objective is to build the bipedal mechanism for a human-sized humanoid robot (which called Nino later on) from a prototype design and run the developed ZMP-based walking on it. Since there was no human-sized bipedal robot has been successfully built in our lab before, it was a challenging task at that moment. one year later, with a well-planned schedule, the efficient execution, and the great team work, we managed to built the bipedal robot and the ZMP-based walking was successfully tested.
Mechanism design of the biped mechanism with trunk
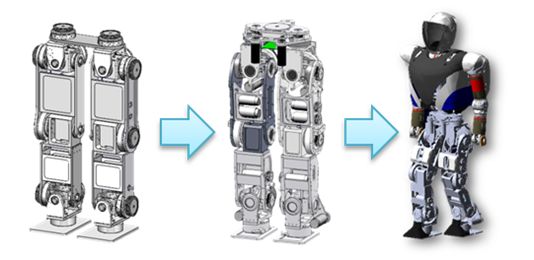
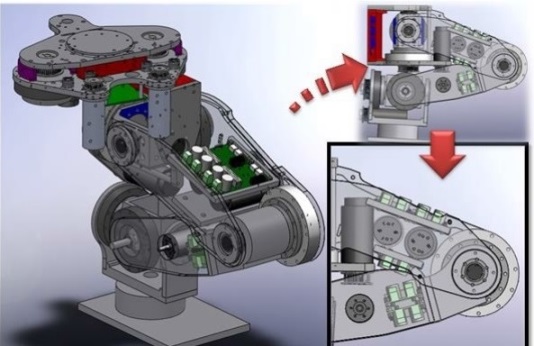
- The mechanism design (SolidWorks).
- Performed FEA analysis (CATIA and SolidWorks) with different mechanism groups to optimize the structure (as shown below).
- Checked the design with walking simulation.
- Chose proper mechanical components (bearings, timely belts/pulleys, harmonic drives and motors) to meet the requirements (from simulation).
- Generated CAD drawings, exploded views and documentations for mechanism fabrication and assembly.

Electronics development of the biped robot

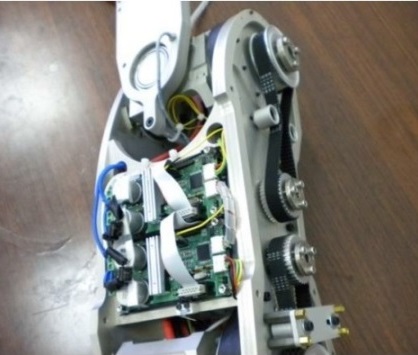
- Soldered the control boards (motor driver with MCU) with motor testing.
- Arranged the wiring of the eletronics and trouble-shoot (as shown below).
- Wrote the firmware of the MCU (in control board) for the (joint) homing.
- Designed the PCB for CAN Bus to USB adapter, and wrote its firmware.