This is a project using trajectory optimization with direct collocation framework. The objective is to generate multi-domain walking for bipedal robot AMBER 3. Modified from Michael Posa’s Trajectory Optimization through Contact, we used the Hermite-Simpson transcription to improve the dynamic accruacy for the collocation points approximated as the nodes on cubic splines. In this work we also compared the optimization results with three different contact constraints:
- Sliding allowed contact constraints (SACC, right animation below)
- Non-sliding contact constraints (NSCC, left animation below)
- NSCC with one-sided spring constraints (OSS)
where different styles of walking gaits can be generated with different constraints.
The cost and the double support ratio of those three constraints are shown below, where the optimization result of OSS is probably premature because the additional complementary constraints to describe one-sided springs complicate the original formulation more.
| Constraints | SACC | NSCC | OSS |
|---|---|---|---|
| Cost of transport | 0.048 | 0.049 | 2.664 |
| Double support percentage | 31.37% | 35.48% | 35.48% |
In addition, towards to generate human-like motion, we added several schemes:
- Virtual springs on ankles to adjust the foot-rolling motion (e.g. adjust the gait to have clearer toe-off or heel-strike motions) and a aditional penalty cost to limit the activation of springs.
- An kinematic optimization as post-processing to increase the foot clearance as shown below:
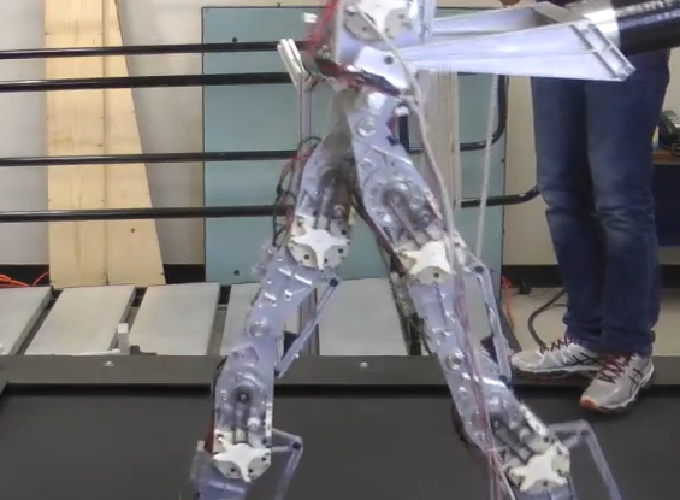
The experiment is still undergoing, but the current result has shown the capability of bipedal locomotion towards to a more human-like movement: