In this project, I implemented the hybrid zero dynamics (HZD) gait optimization and explore the walking generation on different terrains. As shown in the following figure, the optimization formulation contains modulaized constraints, so that it will be easier to customize for different contact sequence.

The overall opt formulation
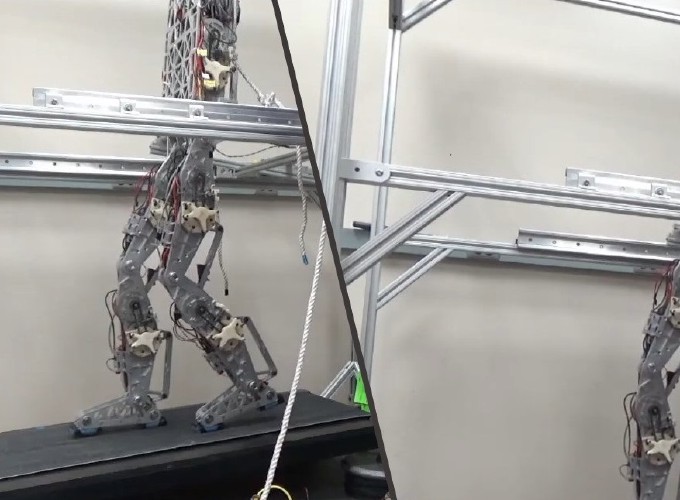
A set of walking motion comparison between optimization results and human walking is compared in this video, where the similar trends and the differences are highlighted and discussed.